

皆さんはじめまして。
今回ブログを担当します、MHです。
サッカー日本代表が予選1位でベスト16入りを果たしたので、今回はサッカーの話題を投稿することにいたします。
この試合は、2分間に及ぶVAR判定により認められた日本のゴールが決勝点となり、日本 2−1 スペインで、Eグループを首位で突破という日本人にとってとても喜ばしい結果を生みました。
クロアチアとの死闘の末、PK戦で惜しくも敗退となってしまいましたが、日本サッカーは確実に進歩しており次の4年後が楽しみです。

今回このインアウトの判定とオフサイドの判定が電子的に出来ないかという依頼があったら、という視点で考えてみました。
仕組みを考えてみるとかなり面白いです。
何かを見て書いているわけではないので、多分に妄想もあります。
オフサイドを自動判定出来ないかという依頼だとします。
コンピュータ化するためには、オフサイドとは何かを明確に定義しておく必要があります。
(単純化しています、実際には色々考慮しなければなりません)
①守備側チームのフィールド内である事
②ボールより守備側チームに近い位置
③後方から2人目の守備選手よりもゴールラインに近い位置
攻撃時に相手陣地内で、パスをしたとき、相手が1人しかいない時にボールを受けてしまうとオフサイドになります。
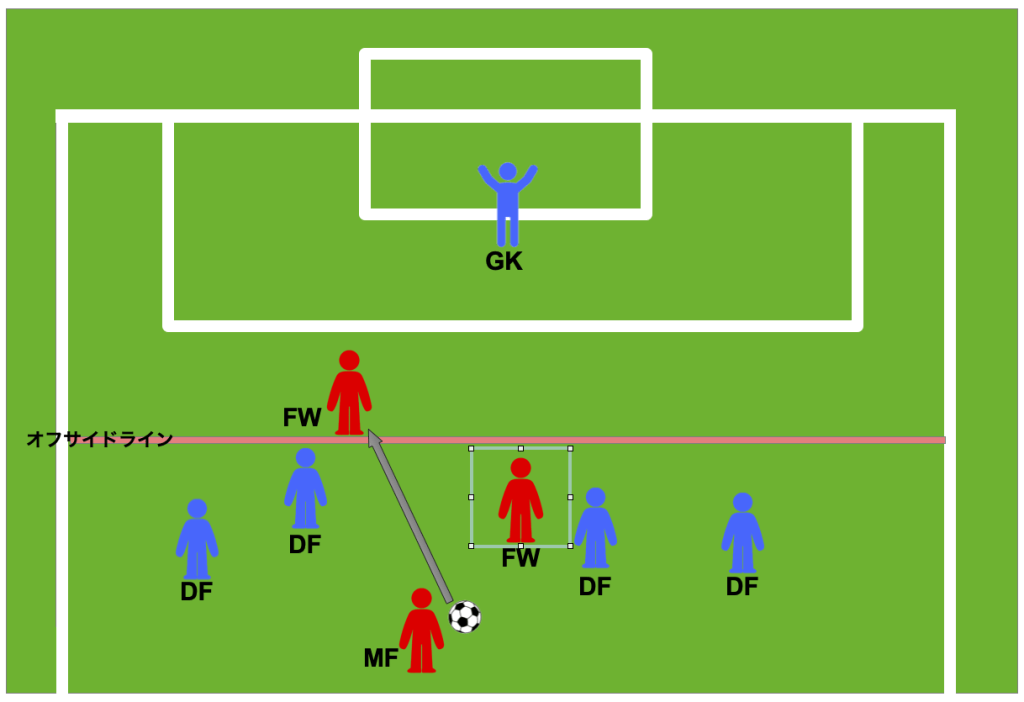
パスを受けたタイミングで相手が前に2人以上いても、味方がボールを蹴った瞬間にオフサイドポジションにいればオフサイドです。
ボールを蹴った時に相手側の2人目の選手がいた位置がオフサイドラインだからです。
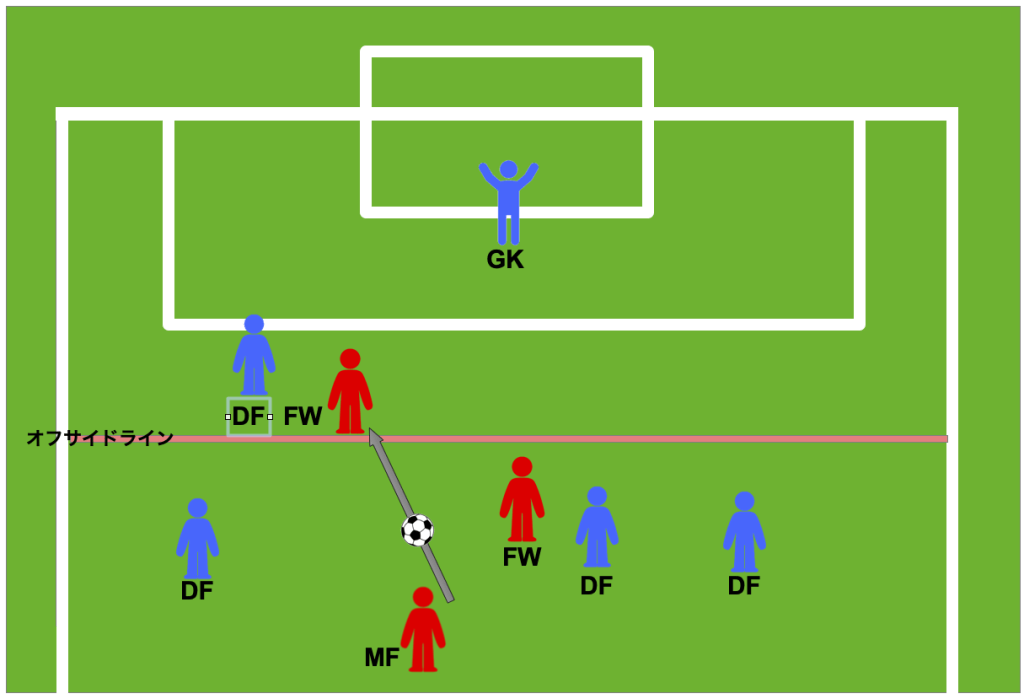
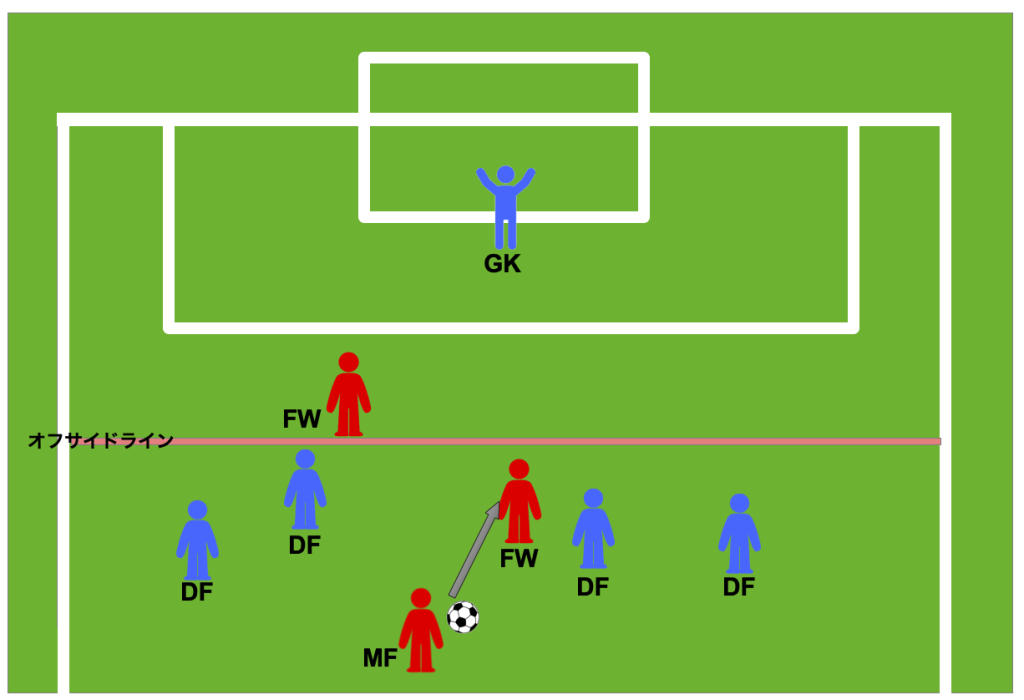
この例はオフサイドではありません。
ということから考えると、上空から選手を撮影して点と見なし、ボールが蹴られた瞬間を検出できれば、オフサイドを判定することができそうです。
簡単にするため、点にしていますが実際は、手足があるため人の体の軸、頭、手足を結んだ線画によるモデリングがおそらく必要です。
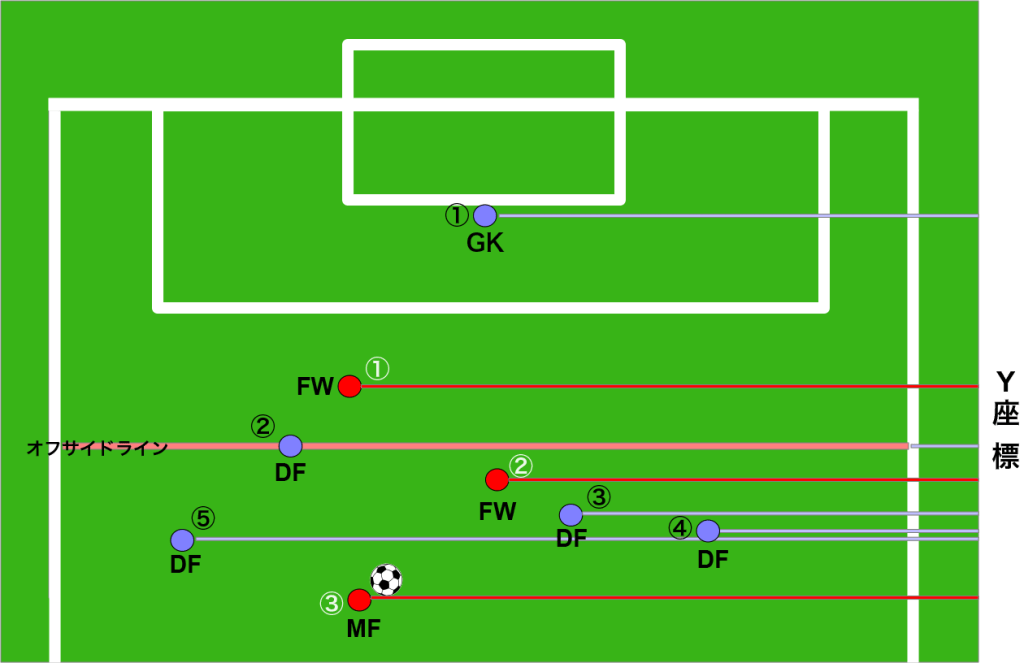
Y座標だけが問題で、味方及び敵の判断ができ、蹴ったボールの方向の判定ができれば、可能となりそうです。
もの凄く単純化して書いてありますが、実際のシステムでは12台のモーションカメラで選手一人一人の位置と動きを割り出し、ボールに内蔵された慣性測定センサーからボールの加速度を検出し、蹴り出しとパス受けと判断をしているのではと推測しています。(もっと複雑とは思いますが。)
オフサイドも判定は、選手の位置とボールの蹴り出したタイミングが非常に重要なので、今回の判定にも使えそうです。
プレイヤーはモーションカメラで判別できるとして、ボールを蹴り出した時はモーションカメラだけでは、では難しそうです。
ボールは蹴られ、3次元(X軸,Y軸,Z軸)の合成ベクトルの力を与えられ、更に各軸が回転するという複雑な動きをしています。
各軸とその回転が計測できれば、次の動き(位置)が慣性の法則でわかりそうです。
慣性の第一法則『物体に外部から力がはたらかないとき、または、はたらいていてもその合力が 0であるとき、静止している物体は静止し続け、運動している物体はそのまま等速度運動(等速直線運動)を続ける』というのがあります。
運動方程式 F=ma(aは加速度)です。
各軸にこの方程式を当てはめ、各軸の回転も当てはめればボールの挙動が予測できます。
慣性で動くボールを計測するには慣性計測チップを内蔵しなければなりません。
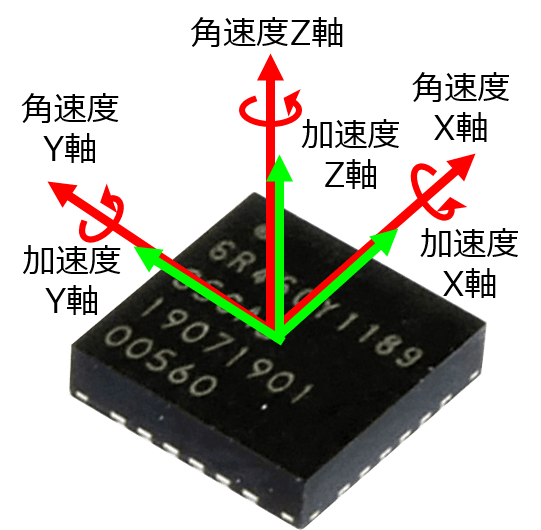
実際は小指先ぐらいの非常に小さなセンサーで、6軸慣性センサーといわれており、各社から色々出ています。
当然これだけでは駄目で、これに読み取るマイクロプロセッサー、Bluetoothなどの通信モジュール、電源が必要です。
既存技術で可能で、弊社でもプロトタイプであれば作成可能です。
今回は、adidas様がこれを作成しているのですが

衝撃的な写真です。
白い球体がゴムで吊られている。
さらに白い線まで。
GANTZを思い浮かべてしまいます。
推測するに、この白い球体には、中心部に慣性測定チップ・コントロールCPU・通信モジュール(恐らくBluetooth・リチウムイオン電池)が入っています。
ボールとしてはバランスも問題なく、通常のボールと変わらず重さも規定値だそうです
中にマイクロプロセッサーとセンサーが入っているので電気が必要で充電します。
何と非接触充電です。(冗談では無く充電が必要です。)

充電されるボール(パロディでは無く本当です)。
ゴールラインの切ったかどうかの判定に必要なデータ
ゴールラインは、最大5インチ(12.7cm)
ボールの直径は22cm
ボールの速度は、通常の人の歩く速度の4倍と言われているので16km、アスリートなので20kmと仮定しましょう。(走ってボールに追いついているからです。)
(実際は慣性計測センサーと上空のカメラより速度は正確に割り出せるはずです。)
ボールの速度を20km/時とすると、20000m÷3600秒=5.5m/秒、22cm÷550cm=0.04秒。
4/100秒でボールはラインを割ります。
さて、IMUの測定間隔は500Hzと公開されています。これは0.002秒。
ボールが最短距離でゴールラインと直交しても0.04÷0.002=20回計測できます。
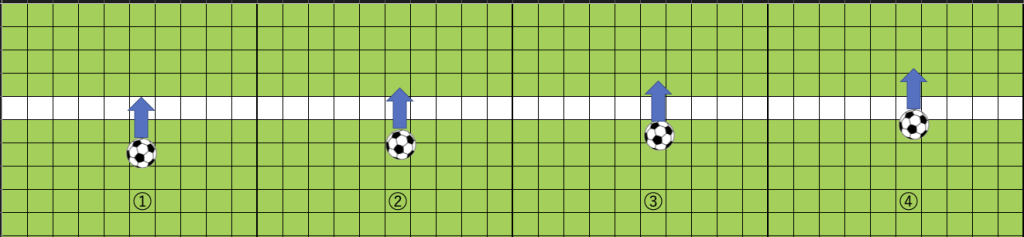
ボールを上空から計測しIMUと同じ速度500Hzで影像を撮影します。
ボールの動きはXYの座標となります。
実際にはZ軸、つまり上方向の動きもありますので、XYZの等速運動と、XYZ各軸の回転が合成された動きを、2次元の座標でとらえます。
座標と角速度の関係を割り出すと、次の0.002秒後にはボールがどこにあるか計算でシュミュレート可能となります。
①②③の座標位置と角加速度で④の位置が推測でき、その値と実測値で更に補正をかけ精度を上げます。
続く⑤⑥でも同じ事を続けます。
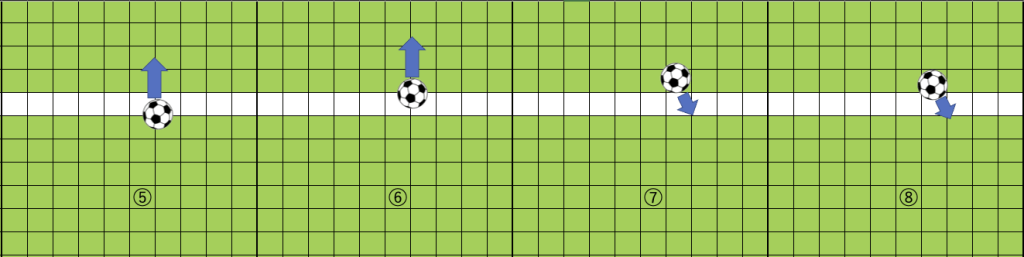
後は、①②③④⑤⑥の計算値から残りラインを切る時間を割り出します。
その時間より前にピッチ外側に向かっていた加速度が、ピッチ内側に向かった瞬間に加速度が逆向きに変化するので、その瞬間の実測座標と、計算で得られた座標がゴールラインを割っていなければOKとなります。
オフサイドの処理では、これに人の位置を追加して判断します。
データは、人間の感情判断の余地を与えず公正な判断の手助けとなります。
VARは、2018年のワールドカップから始まっており、そのときはビデオの判定だったために(座標があったかは不明)、主観が張り込む余地があり色々物議を醸しました。
今回はモーションキャプチャーも導入し、選手の体の動きもベクトル化してもっと精度を上げているようです。
AIでは常套手段です。
通常はマーカーを付けますが、マーカーなしで判断できるようです、素晴らしい技術です。
オフサイドは選手の位置が影響するので、これは必須ですね。

基礎技術も組み合わせれば、色々なことが出来ます。
今回の技術は、敗退してしまったドイツの技術であったところも、なんとも。
色々想像したり、こうしようああしようと考えると、この仕事は面白いですね。
老いぼれMHでした。